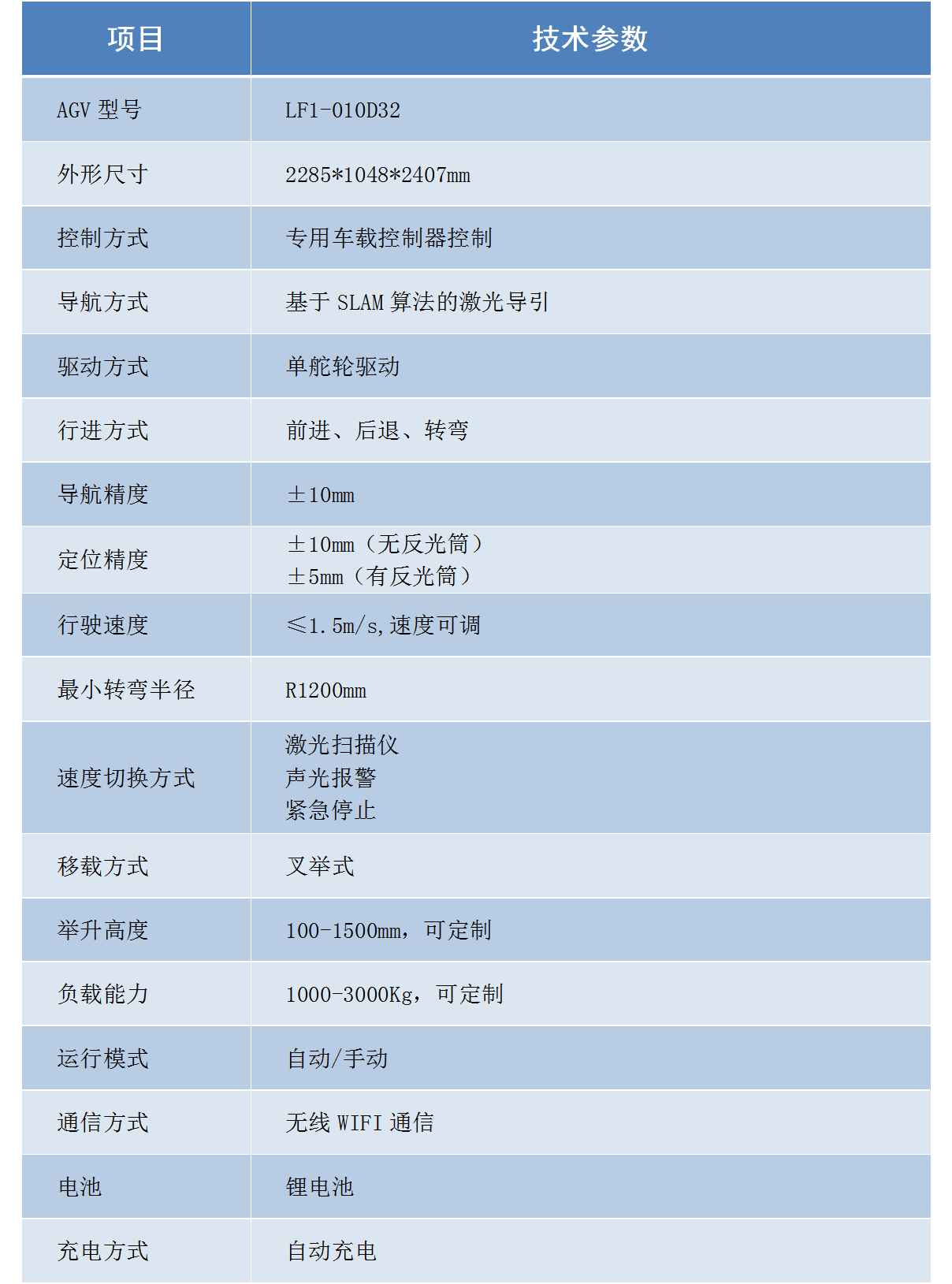
LF1-010D32型激光導引型叉車(chē)AGV采用SLAM算法,可将地圖和路徑定義存儲于AGV車(chē)載控制器,實現在無反光柱做參照的情況下(xià)根據現場環境自主導航,可預設各工(gōng)位的動作流程,通過無線MODBUS協議與上位機系統通信,接受調度指令和反饋自身狀态。
◆ 現場施工(gōng)簡單,AGV自主性更強。 ◆ 在無反光筒的情況下(xià)定位精度在±10mm以内,增加反光筒定位精度可控制在±5mm。 ◆ 自動調節運行速度,在安全距離(lí)範圍内能及時停止。 ◆ 可對現場環境建立初始化地圖,進行路線規劃、工(gōng)位動作流程編排。