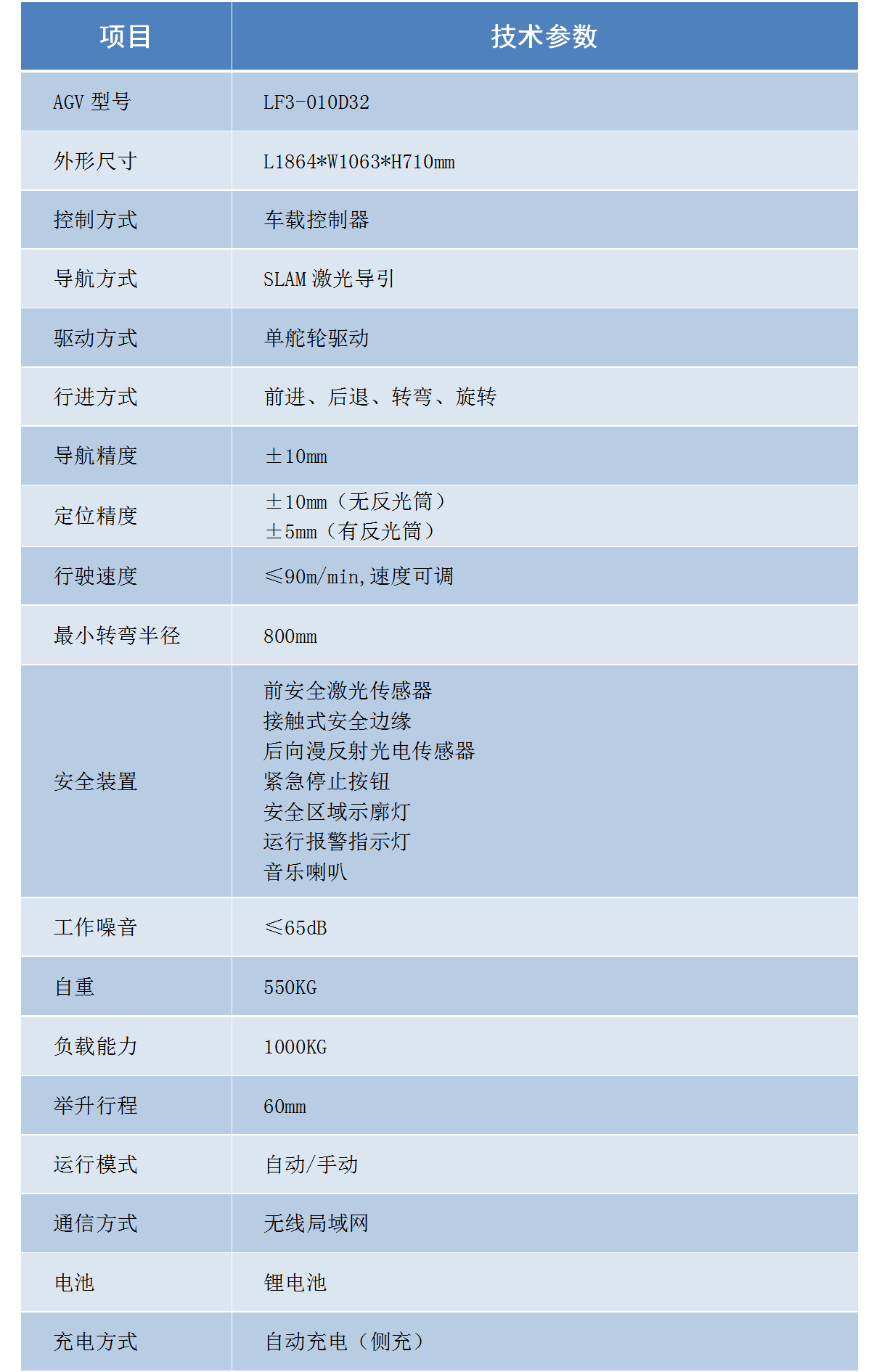
LF3-010D32型激光導引地牛叉車(chē)式AGV采用SLAM算法,可将地圖和路徑定義存儲于AGV車(chē)載控制器,能實現在無反光柱/闆做參照的情況下(xià)根據現場環境自主導航。通過無線ModbusTCP協議與上位機系統通信,接受調度指令和反饋自身狀态。在脫離(lí)無線局域網的情況下(xià)可實現簡單的交通管控和固定線路召喚任務功能。
◆ 現場施工(gōng)簡單,AGV自主性強,定位精準。 ◆ 平穩運行,簡化路線,不易被幹擾。 ◆ 多功能安全警示管理,讓搬運變得更安全。 ◆ 兼容性強,可與其他AGV和MES系統協同運行。 ◆ 可應用于各種工(gōng)業物(wù)流的物(wù)料配送。